近年來人形機器人技術迎來爆發式增長,全球科技巨頭不斷升級人形機器人產品和相關技術,推動機器人在工業、物流、醫療、教育和家庭等領域的廣泛應用。而在人形機器人系統中,靈巧手被認為是最複雜、最精密和最關鍵的執行系統,成為人形機器人發展的核心方向之一,它不僅需要具備高自由度的運動能力,還要實現對力量和位置的精準控制,以模擬人手的操作行為。
挑戰:傳統通訊方式在分散式架構中的瓶頸
在採用分散式電氣架構的靈巧手設計之中,負責每個主動自由度的電機驅動,以及分佈在每個手指的觸覺感測器,需要通過UART 或CAN介面與手掌中央主控MCU通訊。主控MCU透過CAN、RS485、EtherCAT介面接入機器人本體系統匯流排。這種架構存在幾個需要解決的痛點,在一定程度上制約了靈巧手系統的性能提升、架構演進和輕量化、小型化的發展。
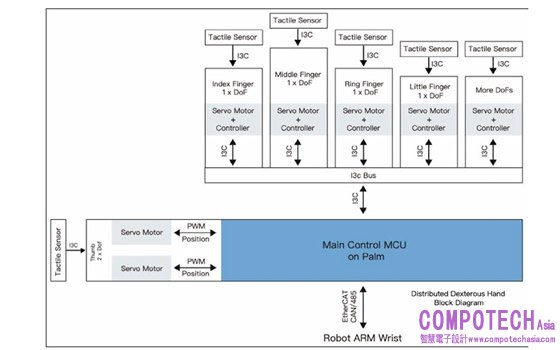
圖:核心通訊路徑與模組分佈框圖