所有依賴馬達實現重要功能的行業都逐漸脫離簡單馬達類型,而向無刷或永磁馬達發展。儘管大幅提高的效率和縮小體積,以及附加功能的輕鬆實現都倍受歡迎,但這些馬達都需要電子控制,這與使用 LED來照明一樣,是一個巨大的突破。本文介紹快捷半導體新型以硬體為基礎的控制器如何實現簡單且精緻的應用。
需要小體積馬達控制的應用
很多應用採用電動馬達實現眾多功能。在不需要精確位置控制,但其他因素更為重要的應用中,過去通常使用的是較為簡單的結構,如同步交流或有刷直流馬達。如今,體積小、系統成本和易於實現更為重要。很多應用還要求較高水準的長時間無故障運行。同步馬達符合這種要求,因為它們結構簡單、可靠性高且系統實現也不複雜。但是,它們的效率偏低,很多時候低於 70%,而且難以改變轉速或實現更先進的功能,甚至幾乎是不可能。
新法規
在很多經濟體制中,電能逐漸成為一種商品,且價格不斷上漲。全球正在實施的新規定中,要求市場排除「浪費」能源的應用並趨於採用更高效的實現方式。例如,歐盟正在對很多應用實施 ErP 指令,歐盟成員國必須將該指令作為地方立法來執行。現在,定義了迫使企業採用 BLDC 或 PMSM 馬達的最低效率指標。自 2012 年 8 月起,這些規定已在循環泵、家用壓縮機、風扇、洗衣機和洗碗機中實行。家用空調、真空吸塵器、水泵和工業壓縮機都處於調整期,這意味著新方針已制定完成,正在由成員國實施。污水泵、游泳池泵和所有上述組未覆蓋的運動控制應用也都在討論中,有關這些應用的規定也即將出爐。在德國,使用這些應用的馬達被劃分到一個稱為「效率等級」的計畫中,其中最低級(「效率 1」)已不能再使用。正在使用的新馬達為「無刷直流」(BLDC) 或「永磁同步」馬達(PMSM)。

圖 1: 永磁同步馬達
但還不止如此。隨著連接至電網的電控系統的廣泛使用,如變頻馬達控制、固態照明和開關電源,電網中迴圈的無功功率不斷提高,功率因數也不斷下降。這迫使公共事業單位不得不提供比實際所需更多的電網容量,成本很高。正如固態照明,其功率因數校正 (PFC) 電路或其他功率因數較佳的實現已成為約定俗成的標準,對馬達控制應用也即將提出相同的要求。儘管變頻馬達控制可能無法解決這個問題,但必須使用電子控制事實上使實現 PFC 預調節器並遵循新要求變得相對容易。
系統架構和調變方案
驅動 BLDC 或 PMSM 馬達通常通過變頻電路完成,其中將三個電壓施加到馬達端子中。這些電壓在馬達中形成一個轉動的磁場,使轉子隨磁場的運動而運動。為了實現所需的計算,存在各種調變方案。典型的系統方塊圖如下所示。
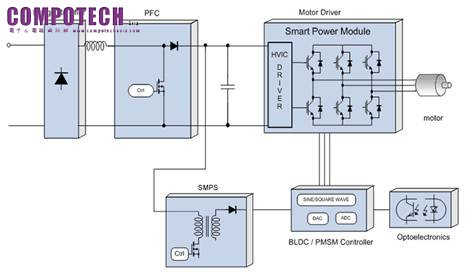
圖 2︰ 獨立馬達控制應用方塊圖
電源電壓首先被整流,然後通過 PFC 級上升到一個穩定的匯流排電壓。該 PFC 級確保輸出時電流和電壓同相,從而實現較好的功率因數。該電壓饋入至由三個半橋組成的逆變器級,由 HVIC 閘極驅動器驅動。來自馬達控制器的控制訊號是由閘極驅動器「轉換」為正確閘極驅動電壓的邏輯訊號,特別注意高端開關的發射極電位將大幅上下擺動。馬達控制器將收到馬達感測器發送的回饋,或通過相電流測量獲得的回饋。在很多情況下,使用光耦合器隔離感測器訊號,這是因為在工業應用中,環境可能比較嘈雜,而這可能會修改較小的感測器訊號。輔助開關電源用於為控制器提供電力。
對於變頻級的電源開關,存在多種解決方案。很多應用中,使用了智慧功率模組如快捷半導體的 FSB5 系列,它們將電源開關(MOSFET 或 IGBT)與閘極驅動器結合起來,因此可以通過邏輯訊號控制整個功率級,所有複雜的功率路由和驅動要求也都在模組內部進行了適當的考慮。只有那些成本壓力極大且沒有系統尺寸要求或系統尺寸要求很低的應用會通過分立式元件實現功率級,當然其可靠性會降低。
首先,變頻器開關頻率通常取決於使用的電源開關,用於最高功率 100W 的較小馬達,使用帶有 MOSFET 的智慧功率模組,允許高達 50kHz 的開關頻率,儘管多數應用為了減少開關損耗,工作頻率遠低於最高值。較高的開關頻率能夠提高動態性能,但很多應用不需要這樣。較大的驅動通常採用 IGBT 作為電源開關,其開關頻率較低。IGBT 的優點是導通損耗較低,尤其是在電流較高時。
系統開發人員的一個重要目標通常是實現最低的轉矩波動(torque ripple)。這樣,會減少機械雜訊,提高可靠性、降低系統成本。這是因為,舉例來說,軸承的大小需要調整以支援最大轉矩。這樣就迫使使用複雜度更高的調變方案,比如空間向量調變。
實現附加性能如變速,控制功率升降,以及增強穩固性的功能(如反轉馬達,解除泵阻塞)確實會增加馬達控制器的負擔。逐脈衝開關控制、先進的演算法以及附加功能對即便很簡單的應用也會有很高的計算性能要求。
以硬體為核心的馬達控制引擎
變頻馬達控制已經應用了很長一段時間。這些系統通常採用一個提供必要計算「馬力」的 DSP,以計算精確控制馬達所需的脈衝。
但還有很多應用,如泵、風扇、速度較低的材料運輸、馬達控制的螺線管、門窗,都不需要系統級的複雜功能。在這些應用中,通常要求馬達以預定義的較低速度運行,不會有很大的動態變化,功率要求也相對恒定,幾乎不需要動態調節。但它們要求較小的尺寸、較高的效率和較低的系統成本。增加終端客戶好評的附加功能可能包括轉速的一些變化、應用故障恢復、顯示系統狀態、接收一些簡單的外部命令。
現在,BLDC 或 PMSM 馬達的使用迫使工程師們使用較大的 DSP,以及軟體發展所需的程式設計和調試工具 — 這對於以前從不開發複雜電子器件和軟體的公司來說需要邁出很大的一步。包括快捷半導體 FCM8201、FCM8202 和 FCM8531 在內的新產品能夠彌補這種差距。這裡,馬達控制演算法通過稱為「先進馬達控制器」的專用硬體控制器來實現,而主機控制(host control)功能,如使用者介面、低速保護功能以及通訊功能則通過眾所周知的8051 架構的微處理器實現。這種任務分工對兩者都最好,高速馬達控制引擎將有效控制馬達,而主機的程式設計也非常容易。
FCM8201 提供系統級可程式設計特性,不僅能夠有效調試系統,而且能夠在運行中監控系統狀態,並根據外部命令改變運行。FCM8202 去除了通訊特性,目標定於不需要任何外部控制的系統,該產品可以在出廠前預程式設計,從而提供直接替代解決方案。如果說這兩個控制器還需要霍爾感測器或類似器件來檢測轉子的位置,那麼新型 FCM8531 則是建立在無感測器控制的基礎之上。相反,該產品評估三個變頻器橋臂的相電流並採用馬達的反電動勢來計算位置和所需脈衝,進一步降低了系統成本。 FCM8531 的方塊圖如下所示。
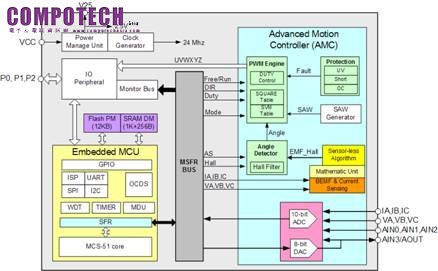
圖 3: 新型無感測器先進馬達控制器的方塊圖
先進馬達控制引擎位於右側,由一組 AD 轉換器(用於接收感測器訊號)和一個 PWM 引擎(通過一個角度檢測器計算硬體中的相應 PWM 脈衝)組成。其餘電路提供不依賴於處理器的保護功能,從而節省 CPU 處理時間。
性能優勢
單單是從 AC 馬達過渡到 BLDC 或 PMSM 馬達就已經能夠大幅提高系統效率,而這些先進硬體馬達控制器所使用的演算法能夠進一步提高效率,儘管不是非常的顯著。但對於上述應用,系統大小很重要,最終目標是將帶有馬達的電控電路集成到小型的空間中。高度整合的控制器顯然有助於實現這個目標。另外,通過使用能夠縮短客戶設計週期的完整備案參考設計和評測硬體,可以大幅縮短產品上市時間,同時由於採用了業界標準的主機控制器,實現使用者介面和通訊的時間也大大減少。下圖顯示了基於 FCM8201 和 SPM® 版本 3 (SPM3) 智慧功率模組的緊湊型解決方案的實現,能夠由被銅覆蓋的基板來輕易識別。

圖4:馬達控制器的最小系統尺寸的實現
實現新功能
該主機控制器還用於實現新功能,比如改變速度(只需向馬達控制引擎下達命令即可)、轉動感測、用戶通訊(同時接受使用者輸入和系統狀態報告)、接受附加感測器輸入,並控制其他系統功能,如顯示、中繼或螺線管。以前的馬達類型實現這些功能非常困難,並且成本很高,因此不可能實現以系統成本為推動因素的多數應用。
前景
採用支援快速上市的小體機系統解決方案的硬體馬達控制器,能夠將系統性能提高到新水準。進一步整合帶有 PFC 級的控制器,並最終實現智慧功率模組內部的系統整合,將使這些系統變得更加小巧,並使它們的廣泛應用變得更為容易。